

无人机是典型的低空慢速小目标(简称“低慢小”),所谓低慢小是指飞行高度低、速度慢、反射截面积小的小型航空器和空飘物的统称。低慢小的特性决定了对目标无人机进行探测时具有以下难点:
“低”导致地杂波等背景杂波干扰严重;
“慢”导致探测技术必须具有很好的低速监测能力;
“小”要求探测技术有较高的监测灵敏度及稳定性。
无人机探测技术是综合利用各种传感器来“发现”或“找到”威胁目标,利用目标无人机的物理属性(如光学特性、热学特性、声学特性、磁学特性)的不同,通过上述某些特性的测量来找到目标无人机并进行识别。
雷达是对空中目标探测的主流手段,无线电信号监测、光电识别跟踪以及声学探测等手段也是无人机探测跟踪的补充手段,但无人机本身具有使用常规通信频段、可无线电静默飞行、目标特性小、机动性强、行动突发性高、噪声小等特点,因此这些探测手段也面临巨大挑战。

感知技术分析
01
雷达探测
雷达探测是雷达系统通过发射电磁波,利用无人机机身对电磁波反射原理从而对无人机进行监测和位置测量,通过接收分析反射的雷达波可以获得目标的距离、高度、方位、速度等信息。雷达探测技术可分为多种类型,包括脉冲雷达、连续波雷达、多普勒雷达、相控阵雷达等。
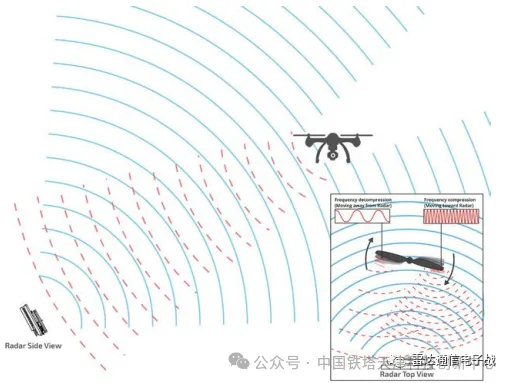
优点:雷达探测是一个成熟的探测技术,具有远距离探测、对目标定位精确、反应效率高等优势,还可全天候探测无线电静默状态无人机。
缺点:雷达探测技术存在100m-400m的盲区,受背景杂波影响大,无法探测悬停或较低速的目标,难以消除虚警,无法分辨无人机及其他空中异物。此外,雷达探测需要架设雷达天线,对架设条件要求较高,如果雷达天线架设在城市建筑物的楼顶,则会对周边区域产生较为明显的电磁污染,因此仅适用于对空或平坦开阔区域,并且雷达天线的建设成本较高,后期维护难度大。
02
无线电信号探测
无线电信号探测技术包括多点定位和多点测向,通常情况下,无人机在飞行过程中飞控系统和图传系统均会发射无线电信号。无线电信号探测通过分析飞控信号和图传信号的频谱特征,实现对无人机的精准探测和识别。
优点:部署简单,不受到无人机几何形状、材质以及周围建筑物影响,不会产生电磁污染。能识别无人机机型和侦测定位无人机操作者,适用于长期无人值守的防御中。
缺点:对于经过加密处理的信号进行破解需要花费大量时间,不利于提升跟踪效率。需要频谱波形分析,定位协议开放无人机。近目标无线电静默状态无人飞行器探测困难。
03
TDOA(时间到达差定位)
TDOA(Time Difference of Arrival,时间到达差)技术是电磁频谱认知技术中一种重要的无源被动探测定位技术,通过测量信号到达不同接收器的时间差来确定信号源的位置。

优点:探测距离远,可达3-5km。定位精度高,能够给出无人机的三维坐标,可引导摄像机跟踪监测,稳定性好。
缺点:部署略复杂,为实现三维定位或获得更高的精度,一般需要四个单元组网才能形成定位能力,并且无线电静默状态无人机监测困难。
04
ADS-B技术
ADS-B(Automatic Dependent Surveillance-Broadcast,广播式自动相关监视)无需人工操作或者像二次雷达一样去询问,飞机会自动地将自己位置、高度、速度、航向等信息向其他飞机或地面站广播,以供管制员及飞行员对飞机状态进行监控。
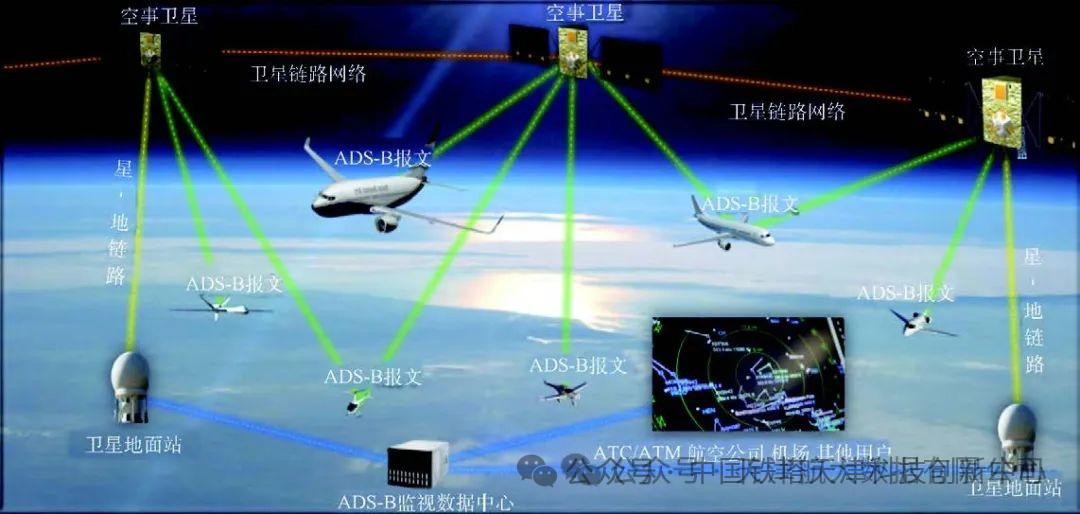
优点:具有较低的运行成本和维护成本,使用寿命长,无需人员值守,远程监控即可。地面站建设灵活简单且不受地形限制。定位精度高,更新率快,能够真正实现飞行信息共享。能够加强空-地协同,与飞行中航空器的通信更便捷。加强空-空协同,提高飞行中航空器之间的相互监视能力。
缺点:ADS-B本身不具备对信息源的验证功能,如果航空器给出的位置信息有误,地面站设备无法辨别。在全球导航卫星失效情况下,ADS-B不能正常工作。广播监视的安全性能有待提升,ADS-B的协议是公开的,其信息未经过加密,获取简单,该技术易受他人的蓄意监听,可能被不法分子进行人为的干扰和篡改,影响航空安全性。
05
通感一体(5G-A)
5G-A(5G-Advanced),也称为“5.5G”,是5G网络在功能上和覆盖上的演进和增强版本。这一技术不仅保留5G原有的高速率、低时延、大连接等特点,还在多方面实现提升,引入全新革命性技术,如通感一体化。通感一体化技术是将通信与感知功能融合的创新方案,通过集成通信基站、卫星通信和定位、无人机等关键基础设施,形成一个协同的网络系统,提供无缝的通信和高精度感知服务,支持低空经济领域的各种应用。
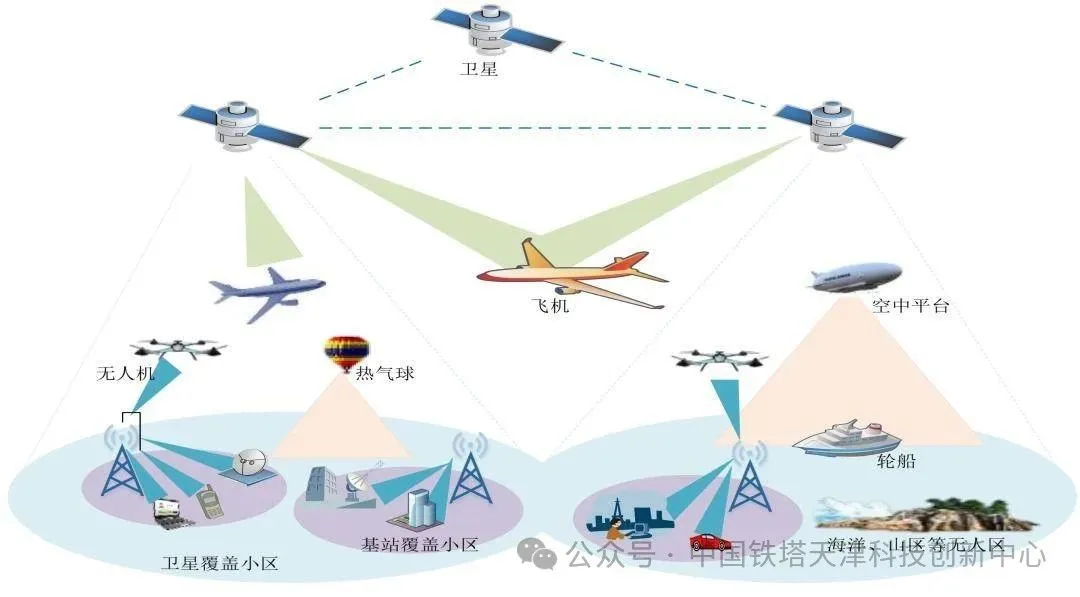
优点:通感一体技术具有全天候、定位精度高、可达米级等优势。部署简单,通过升级5G网络可以实现,同时跟踪的目标批次多,可以探测无线电静默状态无人机。
缺点:目前处于试商用阶段,大规模部署没有明确时间表,且大规模商用成熟度有待验证。
06
光电识别跟踪
光电识别跟踪技术是指利用光学技术、红外技术、激光技术等技术的成像对目标无人机图像进行识别,具备目标视频取证功能,需要探测发现设备做引导,获取其类型和位置等信息。光电识别跟踪是一种高精度跟踪,可引导精确打击。

优点:广泛分布的铁塔高点可以弥补探测半径受限问题,直观且便于判别。能够叠加智能检测算法,监测无线电静默状态下的无人机。利用热成像具有一定的夜间探测能力。
缺点:需要其他手段引导,主动搜索能力差,探测范围窄,不能高效探测区域内多架无人机,极易受天气条件的影响。单摄像机无法给出目标精准位置信息。
07
声学探测
无人机在飞行时,因其螺旋桨的高速转动会产生声波,不同的无人机具有不同的声纹特征。声学探测就是对这一声波进行接收、采集、分析,通过与已有声纹特征数据库里的信息进行智能匹配,实现对无人机的监测发现和型号识别。
优点:该技术作为被动监测手段,具有很好的隐蔽性,设备简单且成本较低。白天夜间都有探测能力,还可探测无线电静默状态无人机。
缺点:该技术仅适用于近距离探测,受环境噪声影响大,需要维护声纹库,无法识别未知无人机。单个声学探测设备不具有引导摄像机跟踪监测能力。
08
多传感器融合
多传感器融合是指集成音频和视觉功能、雷达和视觉成像、射频和图像传感器等多种模式,以增强无人机探测、跟踪和分类。数据融合算法结合了来自不同传感器的信息,以创建全面的态势感知图,提高探测系统的稳健性和准确性。
优点:提高探测可靠性,减少误报,提供强大的跟踪能力。
缺点:需要复杂的数据融合算法和多种传感器技术的集成。
综上所述,低空空域的无人机探测技术表现出三大特点:强对抗性、强实时性、高碎片性。RCS反射面小、隐身涂层且无线电静默自主飞行的低空无人飞行器,多为军用,目前捕获、感知手段存在相当困难。结合目前快速发展的卫星导航与通信技术、集群协同控制技术、仿生技术、人工智能技术,无人机未来将朝着隐蔽、集群、机动、智能方向发展,因此对其探测、识别、处置的难度越来越大,急需发展新型有效的探测识别技术。
来源:中国铁塔天津科技创新中心

